Hephaestus - Drilling and bracket mounting robot
Project name: Hephhaestus
Time period: Jan 2017 – Dec 2020
Partners: TUM, Fraunhofer, LIRRM, Technalia, Fochi, Cemvisa, R2M
The core concept
Hephaestus was an EU project under the Horizon2020 tab, with partners from Germany, France, Spain and Italy. The idea was to develop a concept demonstrator of a cable robot (Cable Driven Parallel Robot - CDPR) for automatic attachment of facade modules to new buildings.
Our role
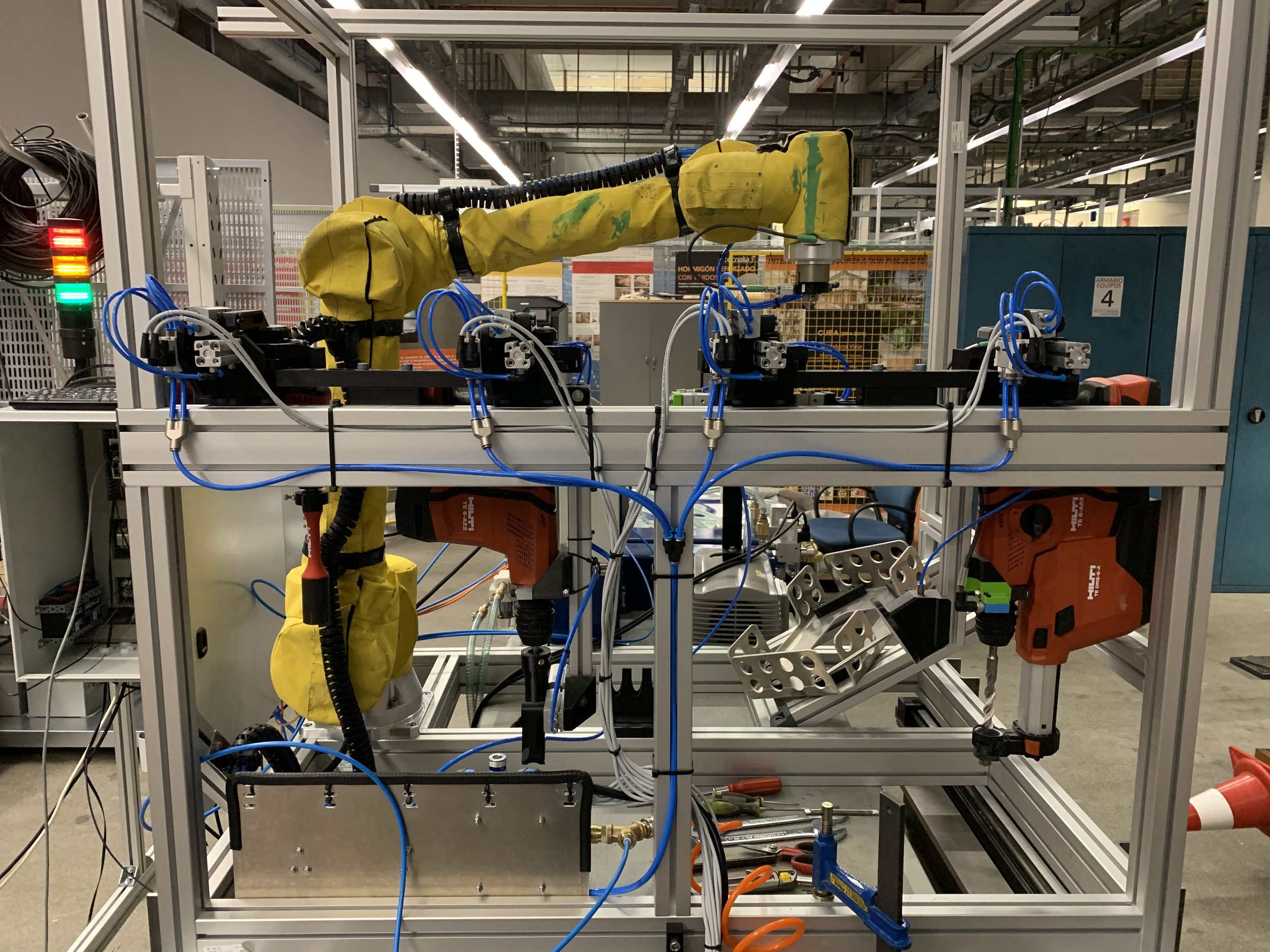
Our job was to design, manufacture, program and implement a robotic arm with tool changer and custom tools to fasten brackets for curtain wall modules.
The positioning system was based on a total station and nLink know-how was used to measure multiple prisms on the CDPR to accurately establish position and orientation (6dof).
This allowed us to calculate the positioning of the robotic arm and manipulate the custom tools to mount the bracket fully autonomously to the building.
Challenges we solved
Communication between ROS and Beckhoff system.
Tool changing in adverse conditions (dust, temperature, wind)
Design custom tools for bracket mounting out-of-lab on a construction site
Support for remote operation and support
Software-support for rebar detection and autonomous contingency actions
Working across borders, cultures and via web (c19-due) on a construction site robot.
Results
Consept demonstrator of a facade cable robot being able to automatically fasten mounting brackets and then place curtain wall modules onto the bracket showing the possibility to automate facade installation.